
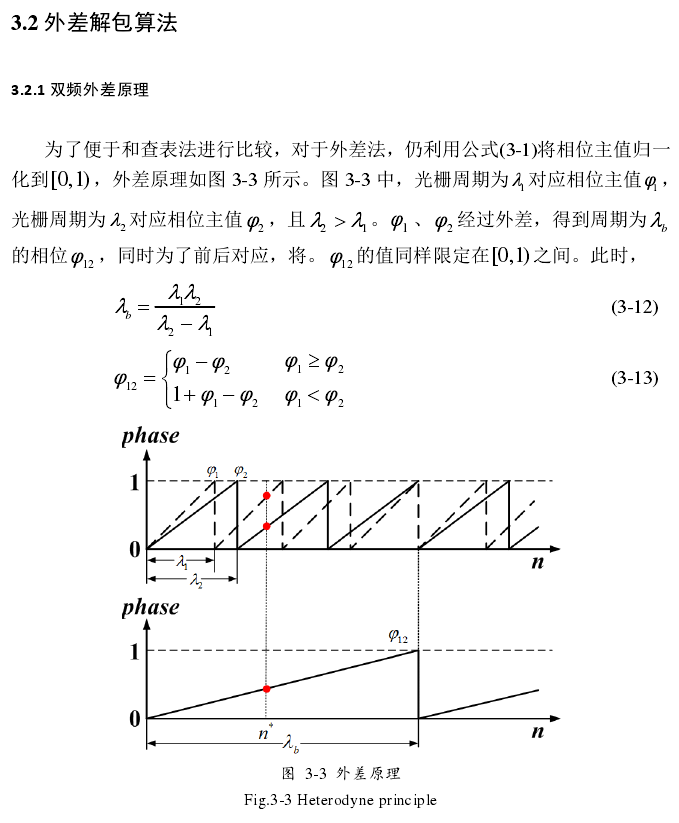
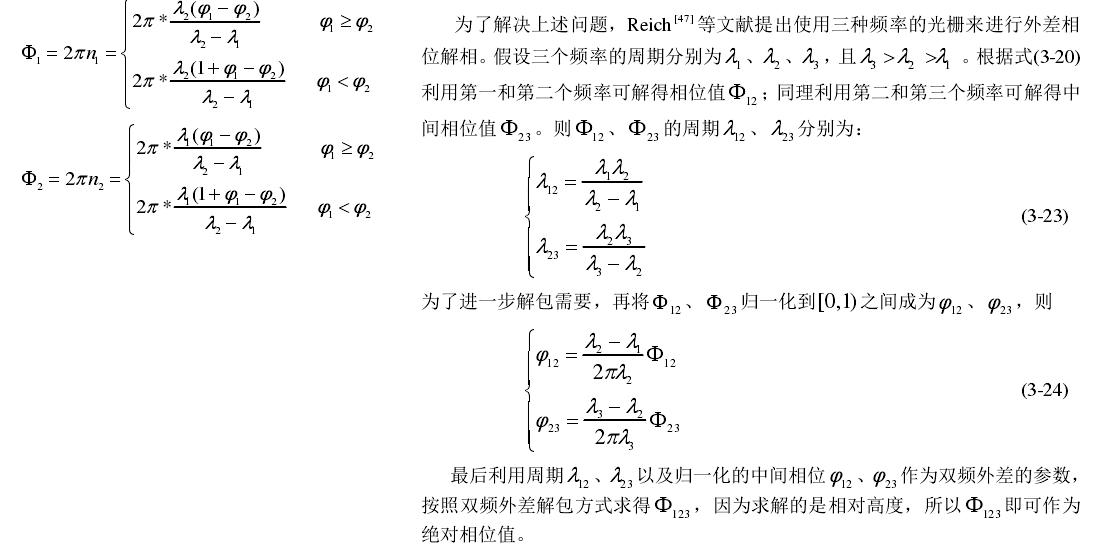
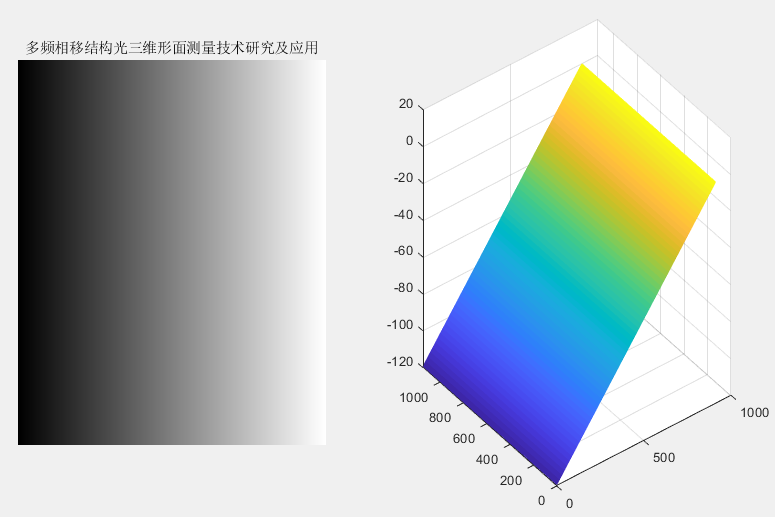
多频相移外差相位展开算法
原理
参数设置
1 | clc;clear;close all |
多频条纹生成
1 | %% f1 生成4频条纹 |
多频外差
1 | % 归一化到[0,1] |
结果
此文章版权归snailgoers所有,如有转载,请注明來自原作者
 微信
微信
相关推荐

8月 20 2021
多频外差原理相位解包裹方法的改进[原作责:陈松林]
频率确认原理 代码123456789101112131415161718192021222324252627282930313233343536373839404142%% ref: 多频外差原理相位解包裹方法的改进% 确定3频参数,解决跳变问题clc;clear;close allp1=20;hPixcel=1024;error=pi/30;out=[];while 1 if p1 < 5 break; end p3Max=floor((pi-error)*p1/error); for p3=p3Max:-1:1 p2=ceil(p3*error/(pi-error))-1; while 1 p2=p2+1; if p2>= p3 break; end if p2<=p1 continue; end p12=...
5月 14 2026
多频外差相位展开李中伟
原理本文参考文献:基于数字光栅投影的结构光三维测量技术与系统研究 12345678910111213F12=F1-F2;F12(F1<F2)=F12(F1<F2)+2*pi;F23=F2-F3;F23(F2<F3)=F23(F2<F3)+2*pi;F12=round(F12*10^8)/10^8;F23=round(F23*10^8)/10^8;F123=F12-F23;F123(F12<F23)=F123(F12<F23)+2*pi;figure,imshow(F123,[]);FF12=2*pi*round((F123*L123/L12-F12)/(2*pi))+F12;FF1=2*pi*round((FF12*L12/L1-F1)/(2*pi))+F1; 实验结果
5月 14 2026
一种非线性相位误差的全场补偿方法
参考文献:一种非线性相位误差的全场补偿方法 原理误差平面求解相位误差补偿
评论